Convex hull
In mathematics, the convex hull or convex envelope for a set of points X in a real vector space V is the minimal convex set containing X.
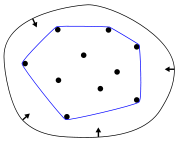
In computational geometry, a basic problem is finding the convex hull for the finite nonempty set of points in the plane. Unless the points are collinear, the convex hull in this case is a convex polygon, typically represented by a sequence of its vertices ordered along its boundary.
Contents |
Intuitive picture
For planar objects, i.e., lying in the plane, the convex hull may be easily visualized by imagining an elastic band stretched open to encompass the given object; when released, it will assume the shape of the required convex hull.
It may seem natural to generalise this picture to higher dimensions by imagining the objects enveloped in a sort of idealised unpressurised elastic membrane or balloon under tension. However, the equilibrium (minimum-energy) surface in this case may not be the convex hull — parts of the resulting surface may have negative curvature, like a saddle surface (see article about minimal surfaces for examples). For the case of points in 3-dimensional space, if a rigid wire is first placed between each pair of points, then the balloon will spring back under tension to take the form of the convex hull of the points.
Existence of the convex hull
To show that the convex hull of a set X in a real vector space V exists, notice that X is contained in at least one convex set (the whole space V, for example), and any intersection of convex sets containing X is also a convex set containing X. It is then clear that the convex hull is the intersection of all convex sets containing X. This can be used as an alternative definition of the convex hull.
More directly, the convex hull of X can be described constructively as the set of convex combinations of finite subsets of points from X: that is, the set of points of the form  , where n is an arbitrary natural number, the numbers
, where n is an arbitrary natural number, the numbers  are non-negative and sum to 1, and the points
are non-negative and sum to 1, and the points  are in X. It is simple to check that this set satisfies either of the two definitions above. So the convex hull
are in X. It is simple to check that this set satisfies either of the two definitions above. So the convex hull  of set X is:
of set X is:

In fact, if X is a subset of an N-dimensional vector space, convex combinations of at most N + 1 points are sufficient in the definition above. This is equivalent to saying that the convex hull of X is the union of all simplices with at most N+1 vertices from X.
The convex hull is defined for any kind of objects made up of points in a vector space, which may have any number of dimensions, including infinite-dimensional vector spaces. The convex hull of finite sets of points and other geometrical objects in a two-dimensional plane or three-dimensional space are special cases of practical importance.
Computation of convex hulls
In computational geometry, a number of algorithms are known for computing the convex hull for a finite set of points and for other geometric objects, with various computational complexities.
Computing the convex hull means that a non-ambiguous and efficient representation of the required convex shape is constructed. The complexity of the corresponding algorithms is usually estimated in terms of n, the number of input points, and h, the number of points on the convex hull.
Relations to other geometric structures
The Delaunay triangulation of a point set and its dual, the Voronoi Diagram, are mathematically related to convex hulls: the Delaunay triangulation of a point set in Rn can be viewed as the projection of a convex hull in Rn+1 (Brown 1979).
Applications
The problem of finding convex hulls finds its practical applications in pattern recognition, image processing, statistics, GIS and static code analysis by abstract interpretation. It also serves as a tool, a building block for a number of other computational-geometric algorithms such as the rotating calipers method for computing the width and diameter of a point set.
See also
- Hull operator
- Affine hull
- Linear hull
- Krein–Milman theorem
- Choquet theory
- Holomorphically convex hull
- Orthogonal convex hull
- Oloid
References
- Brown, K. Q. (1979). "Voronoi diagrams from convex hulls". Information Processing Letters 9 (5): 223–228. doi:10.1016/0020-0190(79)90074-7.
- Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein. Introduction to Algorithms, Second Edition. MIT Press and McGraw-Hill, 2001. ISBN 0-262-03293-7. Section 33.3: Finding the convex hull, pp. 947–957.
- Franco P. Preparata, S.J. Hong. Convex Hulls of Finite Sets of Points in Two and Three Dimensions, Commun. ACM, vol. 20, no. 2, pp. 87–93, 1977.
- M. de Berg; M. van Kreveld; Mark Overmars; O. Schwarzkopf. (2000). Computational Geometry, Algorithms and Applications. Springer.
External links
- Applet for calculation and visualization of convex hull, Delaunay triangulations and Voronoi diagrams in space
- Weisstein, Eric W., "Convex Hull" from MathWorld.
- "Convex Hull" by Eric W. Weisstein, Wolfram Demonstrations Project, 2007.
- Demo as Java Applet, with source code
- Appropriate problem at SPOJ - check your implementation.
- Demo as Flash swf